
- IC型号
企业档案
- 相关证件:

- 会员类型:普通会员
- 江芸

- 电话:0755-82767515
- 手机:13632671618
- 金俏
- 电话:0755-82767515
- 地址:可开13%税票,只做原装现货、订货 。深圳市福田区华强北路群星广场101栋5楼508
- 传真:0755-82767516
- E-mail:szhmw168@163.com
产品分类
通过实时网络实现两轴网络运动控制系统
发布时间: 2019/7/9 10:19:02 | 256 次阅读
实时确定性以太网协议(例如EtherCAT)已经能够支持多轴运动控制系统的同步运行。1 该同步包含两方面含义。首先,各个控制节点之间的命令和指令的传递必须与一个公共时钟同步;其次,控制算法和反馈函数的执行必须与同一个时钟同步。种同步很好理解,它是网络控制器的固有部分。然而,第二种同步到目前为止一直为人所忽视,如今成为运动控制性能的瓶颈。
本文介绍从网络控制器到电机终端和传感器全程保持电机驱动同步的新概念。所提出的技术能够大幅改善同步,从而显著提高控制性能。
为了解释现有解决方案的局限性,考虑一个两轴网络运动控制系统,如图1所示。运动控制主机通过实时网络向两个伺服控制器发送命令和指令值,每个伺服控制器构成网络上的一个从机节点。伺服控制器本身由网络控制器、电机控制器、功率逆变器和电机/编码器组成。
实时网络协议采用不同的方法使从机节点与主机同步,一种常用方法是在每个节点处配置一个本地同步时钟。这种对时间的共识确保了所有伺服轴的指令值和命令均紧密同步。换言之,实时网络上的所有网络控制器都保持同步。
通常,在网络控制器和电机控制器之间有两条中断线。条通知电机控制器何时需要收集输入并将其放到网络上。第二条通知电机控制器何时从网络中读取数据。遵照这种方法,运动控制器和电机控制器之间以同步方式进行数据交换,并且可以实现非常高的定时。但是,仅将同步数据传送到电机控制器还不够;电机控制器还必须能以同步方式响应数据。如果没有这一能力,电机控制器就无法充分利用网络的定时。在响应指令值和命令时,电机控制器的I/O会出现问题。
电机控制器中的每个I/O(例如脉宽调制(PWM)定时器和ADC)都具有固有的延迟和时间量化。例如,我们来看图2所示的为功率逆变器产生栅极驱动信号的PWM定时器。该定时器通过比较指令值Mx与上下计数器来产生栅极信号。当控制算法改变Mx时,新的占空比要到下一个PWM周期才会生效。这相当于一个零阶保持效应,意味着每个PWM周期T内占空比仅更新或两次(若使用双更新模式)。
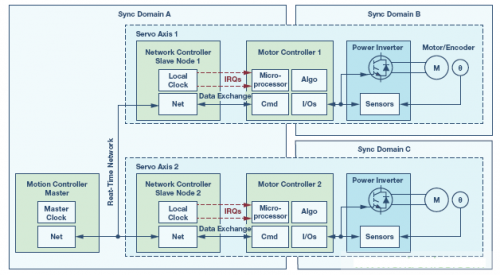
图1.典型的两轴网络运动控制系统。
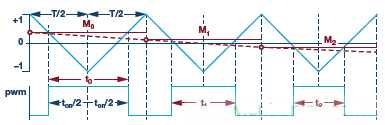
图2.PWM定时器的占空比更新。
在实时网络上,无论数据交换如何紧密地同步,PWM定时器的时间量化将终成为轴同步的决定性因素。当接收到新的指令值时,无法在新的占空比生效之前对其进行响应。这导致时间不确定性长可达一个PWM周期(通常在50 μs至100 μs范围内)。实际上,网络同步周期和PWM周期之间将存在一个未经定义且可变的相位关系。将其与实时网络上低于1 μs的时间不确定性相比较,很显然,电机控制器的I/O在网络同步运动控制中起到更至关重要的作用。实际上,决定同步的不是实时网络,而是系统I/O。
再次参考图1,该系统具有A、B、C三个同步域,它们没有绑定在一起。它们实际上并不同步,具有长可达一个PWM周期的可变不确定性。
同步不确定性及应用影响
在面向机器人和机床等应用的高性能多轴伺服系统中,可以清楚地看到时间不确定性的影响。在I/O级的电机控制轴之间的时间偏移量变化会对机器人或机床的终三维定位产生直接且显著的影响。
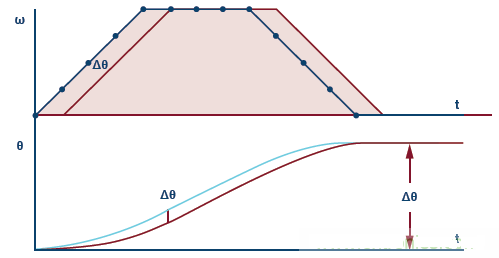
考虑一个简单的运动曲线,如图3所示。在此示例中,电机速度指令值(蓝色曲线)上升后再下降。如果斜坡速率在机电系统的能力范围内,则实际速度预期值将遵循指令值。但是,如果在系统中任何位置存在延迟,则实际速度(红色曲线)将滞后于指令值,从而导致位置误差Δθ。
图3.时序延迟对位置的影响。
在多轴机器中,根据机器的机械结构将目标位置(x, y, z)转换为角度轴向描述(θ1, ..., θn)。角度轴向描述为每个轴定义了一系列相等时间间隔的位置/速度命令。轴之间的任何时序差异都会导致机器的降低。考虑图4所示的两轴示例。机器的目标路径以一组(x, y)坐标来描述。延迟使y轴命令产生时序误差,终导致不规则的实际路径。
在某些情况下,通过适当的补偿可以地降低固定延迟的影响。然而,更关键的是无法对可变且未知的延迟进行补偿。此外,可变延迟会导致控制环路增益发生改变,从而使调整环路以获得性能变得很困难。
应该注意的是,系统中任何地方的延迟都会导致机器不准确。因此,尽可能减小或消除延迟才能提高生产率和终产品质量。
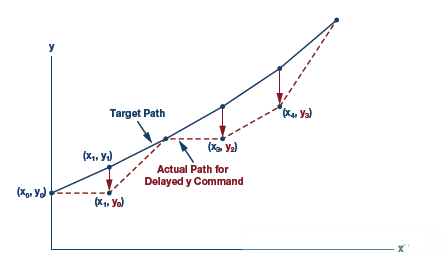
图4.时序延迟对位置的影响。
上一篇:PLC的功能分类以及应用场景
下一篇:特殊应用下的模拟开关优点是什么